I am an ML Researcher/Engineer at Zoox working at the intersection of Controllable World Models + Sensor Simulation + Generative AI + Perception/Scene Understanding.
Previously, I was a Senior Research Scientist at Cruise with a focus on GenAI and World Models for sensor simulation and foundation models for autonomous driving (See section “Synthetic Data for Hardest Cases”). Before that I was Research Scientist at Algolux where I worked on synthetic data and depth estimation for long-range, adverse-weather driving scenarios.
I completed my PhD in Computer Vision at Heidelberg University, Germany, supervised by Prof. Carsten Rother and and co-supervised by Prof. Andreas Geiger. During my PhD, I interned with the Learning and Perception Group at NVIDIA twice, hosted by Shalini De Mello and Jan Kautz.
My main focus during PhD was in leveraging generative image/video synthesis to develop algorithms and data for self-supervised learning of computer vision tasks.
Email : karthik.kovalam@gmail.com
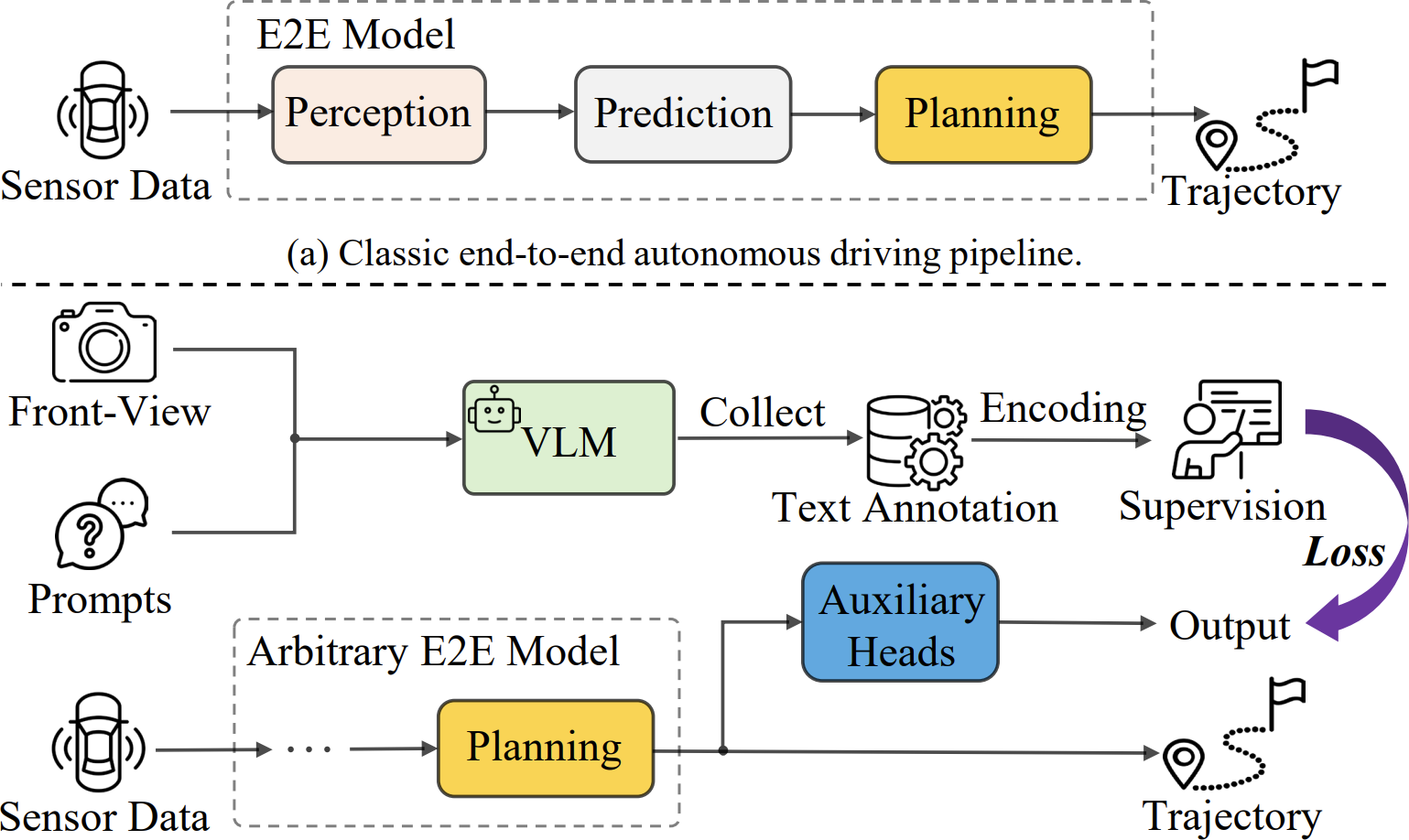 |
VLM-AD: End-to-End Autonomous Driving through Vision-Language Model Supervision
|
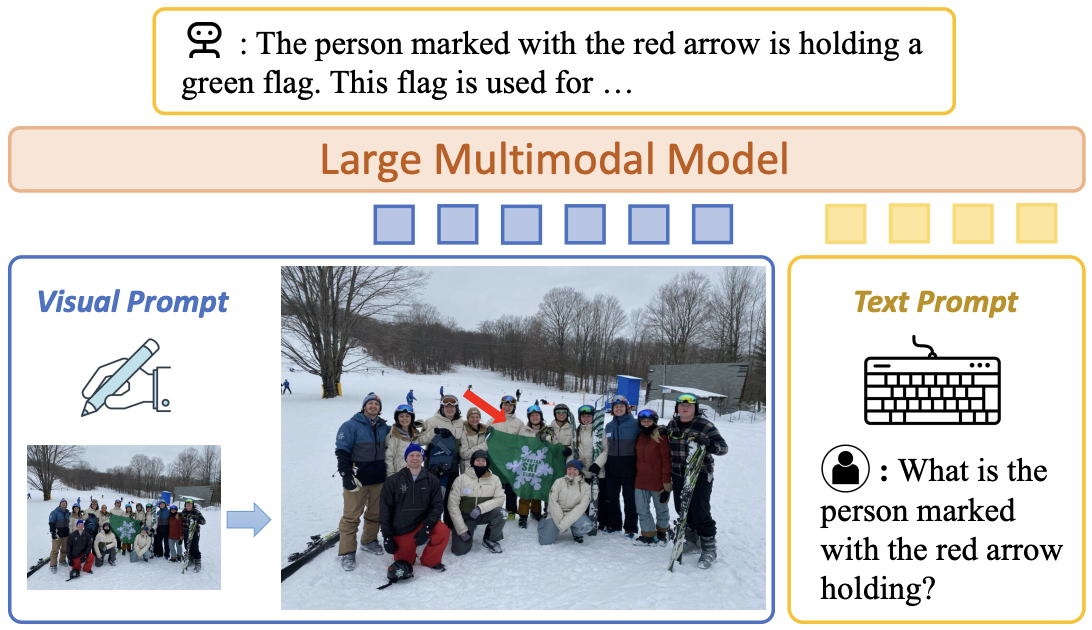 |
ViP-LLaVA: Making Large Multimodal Models Understand Arbitrary Visual Prompts
|
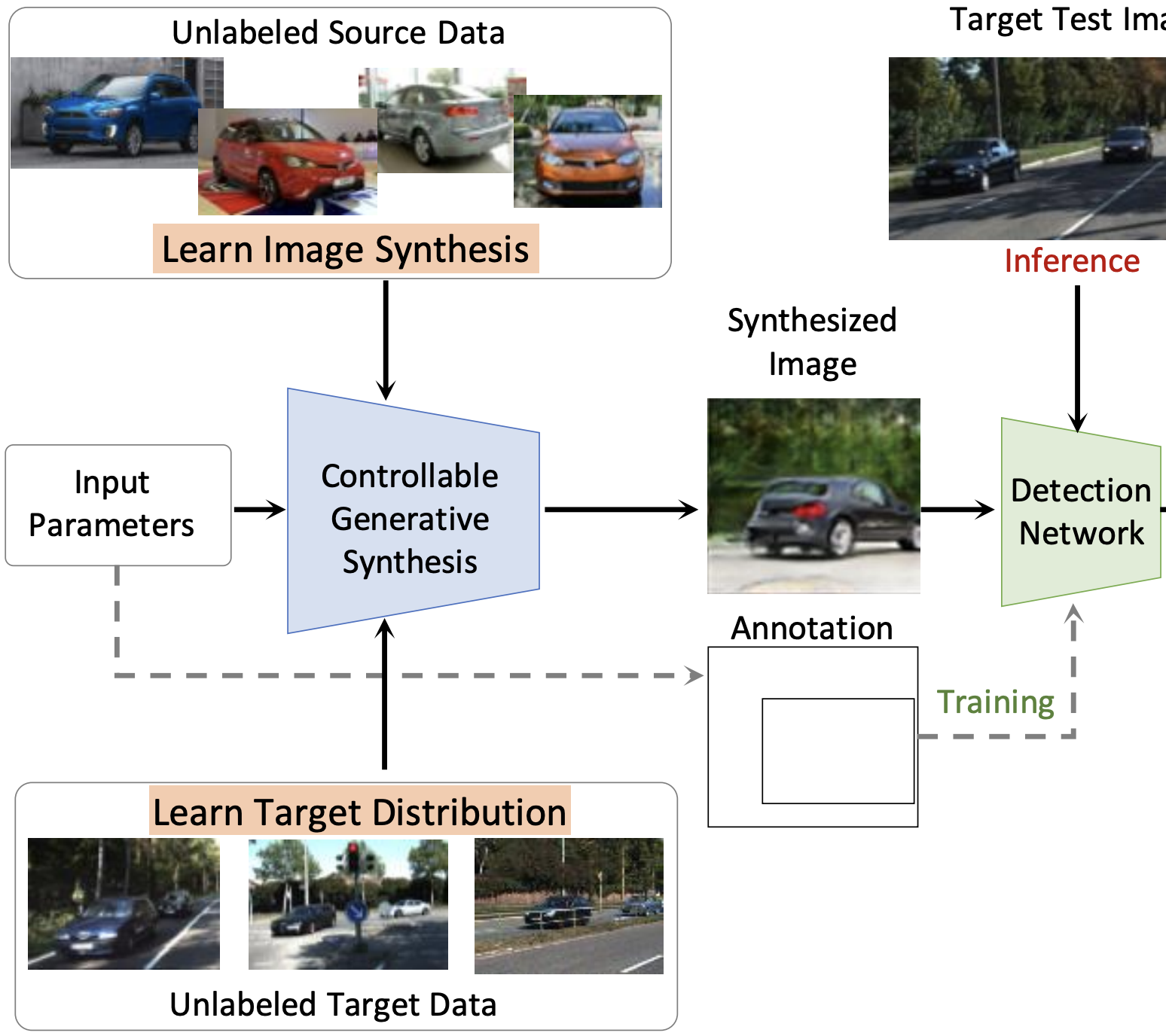 |
Self-Supervised Object Detection via Generative Image Synthesis
|
 |
Self-Supervised Viewpoint Learning From Image Collections
|
 |
Intrinsic Autoencoders for Joint Deferred Neural Rendering and Intrinsic Image Decomposition
|
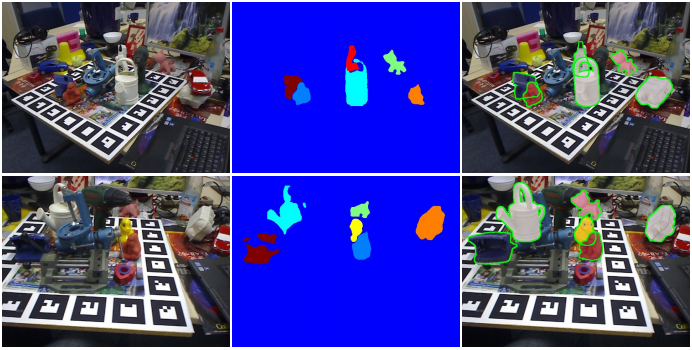 |
iPose: Instance-Aware 6D Pose Estimation of Partly Occluded Objects
|
 |
Bounding Boxes, Segmentations and Object Coordinates: How Important is Recognition for 3D Scene Flow Estimation in Autonomous Driving Scenarios?
|
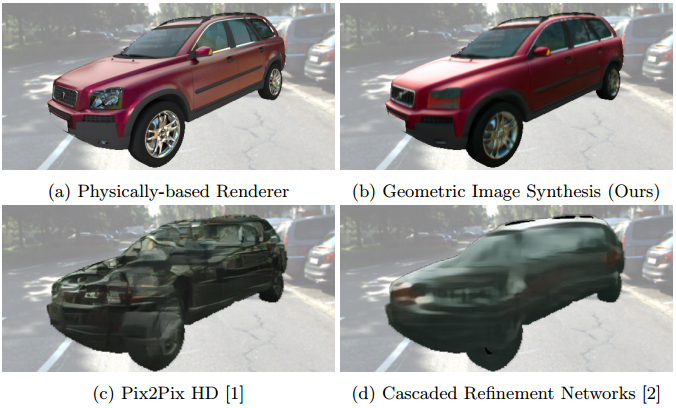 |
Geometric Image Synthesis
|
 |
Augmented Reality Meets Computer Vision : Efficient Data Generation for Urban Driving Scenes
|
| |
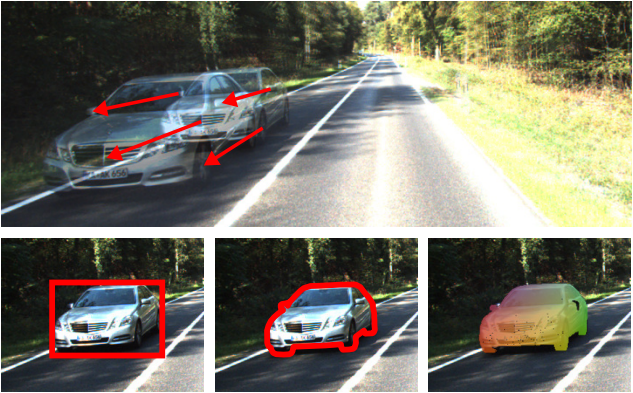
Augmented Reality Meets Deep Learning for Car Instance Segmentation in Urban Scenes
|
 |
Can Ground Truth Label Propagation from Video help Semantic Segmentation?
|
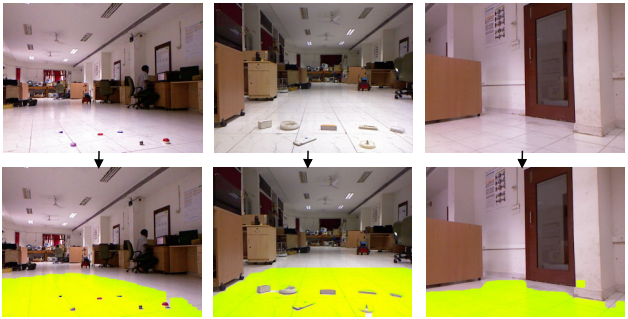 |
Markov Random Field based Small Obstacle Discovery over Images
|
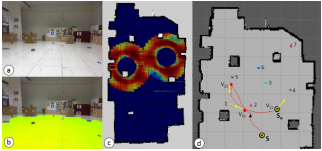 |
Guess from Far, Recognize when Near: Searching Floor for Small Objects
|